关键词 |
机器人表演价格,潼南机器人表演,机器人特技表演,机器人武术表演 |
面向地区 |
招式:通过惯性测量单元和3D视觉感知系统,机器人可将太极拳“云手”分解为368个运动节点,实现毫米级动作还原,如宇树G1机器人演练的太极弧线轨迹与气流模拟效果
空中回旋踢:宇树机器人完成720度回旋踢时,金属关节在0.3秒内完成30度侧倾、120度屈膝、270度髋部旋转的复合动作,落地时通过仿生卸力算法保持稳定
观众互动:基于激光雷达与传感器,机器人可感知观众位置并随机调整舞蹈方向,增强现场沉浸感 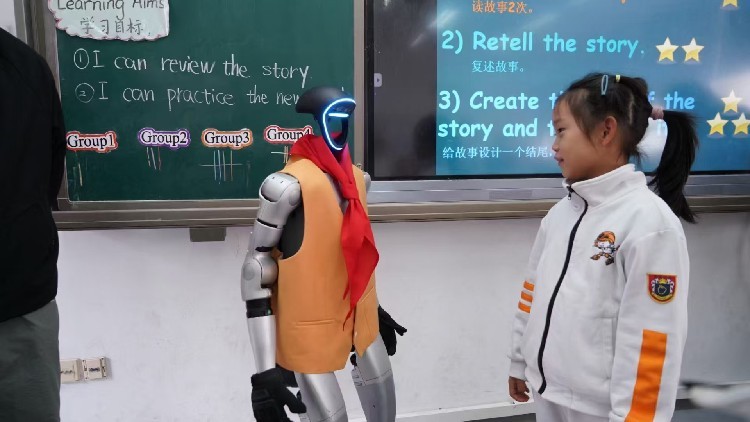
赛博武者形象:金属骨架外覆汉服或武道服,结合LED灯光模拟“内力外放”视觉效果,如回旋踢时关节处迸发蓝光象征气劲爆发。
武术哲学可视化:通过动作轨迹投影技术,将“刚柔并济”理念转化为实体光影,例如太极推手时的空气波纹动态渲染
与人类共舞:16台机器人与真人演员同台表演,通过计算机视觉实时捕捉人类动作并同步调整自身节奏,形成“人机一体”的视觉效果
传统秧歌舞:机器人身着花布棉袄,手持红手绢,复现扭胯、挑帘、甩手等东北秧歌标志性动作,结合锣鼓节奏展现民俗艺术魅力
多道具协同:机器人同时操控手绢、扇子等传统道具,通过末端执行器实现抓握、旋转、抛接等精细化操作。
舞台联动:舞蹈动作与无人机编队、光影效果实时配合,例如手绢挥舞瞬间触发无人机灯光矩阵变换
技术驱动的艺术表达
强化学习编舞:通过视频捕捉人类舞蹈数据,结合轨迹优化算法生成自然流畅的机器人动作库。
震感降噪系统:大幅减少机器人运动时产生的机械噪音,确保舞蹈表演的“静音化”与艺术纯粹性
群舞与队列编排
集群协同舞蹈:通过多智能体协同规划技术,实现16台机器人同步变换队形(如从紧凑方阵扩展至全场舞台),动作误差控制在毫米级,展现“复制粘贴”般的整齐效果

太原本地机器人表演热销信息